OTHERS
2025年12月03日
追加工具と
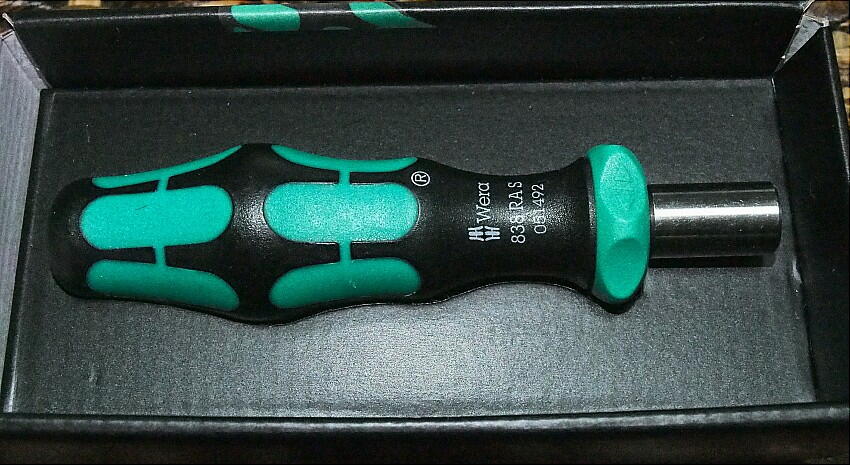
親指の痛みと、狭い場所での取り回しが辛いので、ねじ回しを追加した。 小型で、ラチェット、早回し、磁石機能が付いている物を購入した。
ねじ回しと言えば、Weraと決めている。
今まで使い込んだねじ回しより、小さく細い。 早速使ってみたが、やはり良いね。 ただ、直ぐに緑の柄が、油で黒くなるのが残念。
それと、ドライビング グローブも新調した。 ブラック/コーヒー の彩色が良い。